Projekte Autonome Maritime Systeme
Ferngesteuertes, koordiniertes Fahren in der Binnenschifffahrt (FernBin)
Daten
Bearbeiter:
Youjun Yang
Dr.-Ing. Guillermo Chillcce
Betreuer:
Dr.-Ing. Jens Neugebauer
Prof. Dr.-Ing. Bettar el Moctar
Förderung:
Projektträger:

Projektpartner:
-
Entwicklungszentrum für Schiffstechnik und Transportsysteme (DST)
-
Lehrstuhl Steuerung, Regelung und Systemdynamik
Universität Duisburg-Essen

Projektinformationen
Im Rahmen dieses Projektes werden Methoden zur Fernsteuerung von Schiffen sowie Assistenzsysteme für die ferngesteuerte Schiffsführung entwickelt, validiert und implementiert. Ein landseitiger Steuerstand wird konzipiert, der über die erforderlichen Schnittstellen zu dem ferngesteuerten Schiff, Bedienelemente und Benutzeroberflächen verfügt. Für die Entwicklungsarbeiten werden sowohl ein reales Testschiff als auch ein digitaler Zwilling des Testschiffes verwendet. Das Testschiff wird mit Sensorik zur Messung des Bewegungsverhaltens und des Betriebszustands ausgestattet. Für Funktionstests und die Entwicklung der einzelnen Komponenten der Fernsteuerung sowie zum Training von Schiffsführungspersonal wird ein digitaler Zwilling des Testschiffes entwickelt. Dieser bildet im landseitigen Steuerstand das Fahrverhalten des Testschiffes originalgetreu ab. Es werden mathematische Modelle zur Vorhersage des Manövrierverhaltens von Schiffen weiterentwickelt, die zur Berechnung der Bahn des Testschiffes im digitalen Zwilling sowie zur Prognose der Bahnen der Schiffe in der Umgebung erforderlich sind. Die Bahnen der Schiffe in der Umgebung werden von zu entwickelnden Assistenzsystemen prognostiziert, um mögliche Kollisionen zu erkennen und die nutzbare Fahrrinnenbreite des Testschiffs zu berechnen. Für die Prognose des Fahrverhaltens der anderen Schiffe werden unterschiedliche Methoden entwickelt und fusioniert, um eine möglichst hohe Sicherheit zu gewährleisten. Dafür werden u.a. Methoden zur indirekten Systemidentifikation des Manövrierverhaltens aus AIS-Daten entwickelt. Das Teilvorhaben beinhaltet die gezielte Untersuchung, Bewertung und Optimierung der Mensch-Maschine-Interaktion sowie der Arbeitsabläufe. Die Entwicklungen werden virtuell und am realen Schiff getestet und in Abschlusstests geprüft.
Datengrundlagen, Infrastrukturen und Technologien für Virtuelle ERprobungen von Automatisierungsfunktionen (VERA)
Daten
Bearbeitet durch:
Tim Vievering
Yuxing Lin
Benjamin Kossmann
Betreut von:
Dr.-Ing. Jens Neugebauer
Prof. Dr.-Ing Bettar el Moctar
Förderung:
Projektträger:
Projektpartner:

Projektinformationen
Im Rahmen des Vorhabens wird ein virtuelles Testfeld für die Entwicklung von Technologien für die Fernsteuerung, Teil- und Vollautomatisierung von Schiffen entwickelt. Der Fokus liegt auf der Modellierung der virtuellen Umgebung und dem virtuellen Schiff. Weiterhin wird das Schiffsführerverhalten maßgeblich betrachtet und virtuell abgebildet. In Zusammenarbeit mit den anderen Partnern wird ein gesamtheitliches virtuelles und modulares Abbild der Binnenschifffahrt entwickelt, wobei auch der Verkehrsfluss betrachtet wird.
Methoden zur sicheren Ausgestaltung der Automatisierung und Fernüberwachung in der Binnenschifffahrt (SAFEBin)
Daten
Bearbeitet von:
Björn Wierczoch
Jörn Linde
Betreut durch:
Dr.-Ing. Jens Neugebauer
Prof. Bettar el Moctar
Förderung:
Projektträger:
Projektpartner:
-
Entwicklungszentrum für Schiffstechnik und Transportsysteme e.V.
-
Lehrstuhl für Steuerung, Regelung und Systemdynamik
Universität Duisburg-Essen
Assozierte Partner:
- Zentralkommission für die Rheinschifffahrt
- Gesamtverband der Deutschen Versicherungswirtschaft

Projektinformationen
Die Automatisierung möglichst vieler bislang durch die Besatzung durchgeführter Prozesse wird als ein zukunftsorientierter Ansatz zur Bewältigung des Fachkräftemangels und zur Stärkung der Wettbewerbsfähigkeit der Binnenschifffahrt wahrgenommen. Im Mittelpunkt der aktuellen Entwicklungen stehen Systeme für die autonome Schiffsführung sowie die Fernüberwachung und Fernsteuerung. Analog zu anderen Verkehrsträgern ergeben sich somit Fragen nach den rechtlichen Rahmenbedingungen für den Einsatz von Systemen für das autonome Fahren und der Gewährleistung der Sicherheit. In diesem Kontext werden in dem Verbundvorhaben SAFEBin die Grundlagen für die Risikobewertung von Systemen für die automatisierte Schiffsführung auf Binnenschiffen im Hinblick auf deren Zusammenwirken mit dem Gesamtsystem entwickelt. Wesentliche Voraussetzung dafür ist eine detaillierte Bestandsaufnahme und Analyse des aktuellen Sicherheitsniveaus als Referenzrahmen. Im Weiteren werden bewährte Methoden für die Risikobewertung und den Nachweis funktionaler Sicherheit für die (teil-)automatisierte Schiffsführung in der Binnenschifffahrt adaptiert und beispielhaft angewendet. Das Hauptaugenmerk wird dabei auf Systeme der Automatisierungsstufen 3 und 4 gelegt, in denen der menschlichen Schiffsführung mindestens zeitweise und als Rückfallebene eine wichtige Funktion zukommt. Anschließend werden die Grundlagen für eine vorausschauende automatisierte Bewertung des situativen Risikos geschaffen. Diese Arbeiten bilden die Basis für die abschließende Entwicklung von Standards und Vorschlägen zur Anpassung und Weiterentwicklung von Vorschriften und Regularien im Themengebiet der automatisierten Binnenschifffahrt.
Entwicklung eines mehrstufigen mathematischen Modells zur Berechnung der Bewegung eines Schiffes in sechs Freiheitsgraden
Daten
Bearbeiter:
Jakob Rzezsutko
Betreuer:
Prof. Dr.-Ing. Bettar el Moctar
Dr.-Ing. Lahbib Zentari (BAW)
Dr.-Ing. Michael Schröder (BAW)
Förderung:
Projektpartner:

Projektinformationen
Die Bedeutung der Vorhersage und Bewertung der Manövrierbarkeit von Schiffen nimmt aufgrund der Automatisierung der Navigation zu. Im Rahmen dieses Projektes wird ein mathematisches Modell, basierend auf einer direkten Systemidentifikation zur Simulation der Bewegung von Schiffen bei Manövriervorgängen in sechs Freiheitsgraden, entwickelt. Hierbei sollen Effekte von Sloshing in teilgefüllten Tanks, Gewässerströmung und Maschinendynamik berücksichtigt werden. Das mathematische Modell wird anhand von Modellversuchsergebnissen und Großausführungsmessungen validiert. 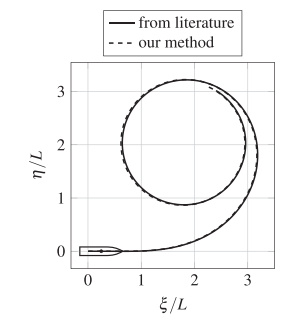
Analyse des Fahrverhaltens von Binnenschiffen mithilfe des maschinellen Lernens
Daten
Bearbeiter:
Kathrin Donandt
Betreuer:
Prof. Dr.-Ing. Dirk Söffker
Dr.-Ing. Jens Neugebauer
Dr.-Ing., Michael Schröder (BAW)
Prof. Dr.-Ing. Bettar el Moctar
Förderung:
Projektpartner:
Projektinformationen
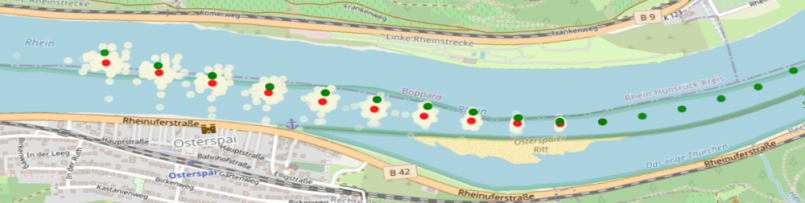
Aufgrund der verhältnismäßig hohen Verkehrsdichte und der Manövriervorgänge auf engen Wasserstraßen ist eine möglichst genaue Vorhersage des Manövrierverhaltens von Schiffen zur Optimierung des Verkehrs auch im Zusammenhang mit der Entwicklung von Fahrassistenzsystemen unabdingbar. Im Projekt soll die Prognose der Bewegung und des Raumbedarfs der an einer gegebenen Verkehrssituation beteiligten Schiffe iterativ in zwei Schritten erfolgen: Zunächst werden mithilfe einer mit AIS-Daten trainierten künstlichen Intelligenz die Trajektorien der Schiffe ermittelt, für die dann in einem zweiten Schritt mit einem Manövriermodell die jeweiligen Fahrspurbreiten der Flussabschnitte ermittelt werden. Das wesentliche Projektziel besteht demnach darin, kollisionsfreie Schiffstrajektorien unter Berücksichtigung des prognostizierten Verhaltens beteiligter Verkehrsteilnehmer durch eine mit AIS-Daten trainierte künstliche Intelligenz zu ermitteln.