Projects Autonomous Maritime Systems
Remote-controlled, coordinated navigation of inland waterways ships (FernBin)
Data
Involved Researcher:
Youjun Yang
Dr.-Ing. Guillermo Chillcce
Supervisor:
Dr.-Ing. Jens Neugebauer
Prof. Dr.-Ing. Bettar el Moctar
Funding:
Project Management Organization:

Project Partner:
-
Entwicklungszentrum für Schiffstechnik und Transportsysteme (DST)
-
Lehrstuhl Steuerung, Regelung und Systemdynamik
Universität Duisburg-Essen

Project information
Within the framework of this project, methods for remote-controlled ships as well as assistance systems for such ships are to be developed, validated, and implemented. A shore-based helm station shall be designed with the necessary interfaces to a remotely-operated vessel, its controls, and its associated user interfaces. Both, a real test ship and a digital twin of this test ship shall be used for the development work. The test ship is to be equipped with sensors to measure its motions and its operating status. A digital twin of the test ship will be developed for functional tests and the development of the individual components of the remote-control system as well as for the training of ship management personnel. In the shore-based helm station, this faithfully reproduces the handling of the test vessel. Mathematical models for predicting the maneuverability of ships will be further developed. These models are necessary to obtain the trajectory of the test vessel’s digital twin as well as to predict the trajectories of other ships located in the immediate vicinity. The trajectories of the other ships shall be predicted by assistance systems to be developed in order to detect possible collisions and to calculate the usable fairway width of the test vessel. Different methods are to be developed and integrated to predict the maneuvers of the other ships in order to ensure the highest possible level of safety. To this end, methods for indirect system identification of the maneuvers from AIS data are to be developed. This sub-project includes the targeted investigation, the evaluation and optimization of human-machine interactions, as well as the associated workflows. These developments shall be tested virtually and with the real ship and are then evaluated in final tests.
Infrastructure and technologies for virtual testing of automated ship operations (VERA)
Data
Involved Researcher:
Tim Vievering
Yuxing Lin
Benjamin Kossmann
Supervisor:
Dr.-Ing. Jens Neugebauer
Prof. Dr.-Ing Bettar el Moctar
Funding:
Project lead partner:
Project Partner:

Project information
The main project objective is the development of technologies for virtual testing of automated ship navigation under realistic operational conditions. Extensive computations of the flow around ships considering currents and wind are performed. The results are implemented in the virtual test field.
Methods for the safe design of automation and remote monitoring for inland waterway navigation (SAFEBin)
Data
Involved Researcher:
Björn Wierczoch
Jörn Linde
Supervisor:
Dr.-Ing. Jens Neugebauer
Prof. Bettar el Moctar
Funding:
Project lead partner:
Project Partner:
-
Entwicklungszentrum für Schiffstechnik und Transportsysteme e.V.
-
Lehrstuhl für Steuerung, Regelung und Systemdynamik
Universität Duisburg-Essen
Associated partner:
- Zentralkommission für die Rheinschifffahrt
- Gesamtverband der Deutschen Versicherungswirtschaft

Project Information
The automation of many processes as possible, which have been carried out by the crew up to now, is perceived as a future-oriented approach to overcome the shortage of skilled workers and to strengthen the competitiveness of inland waterway shipping. The focus of current developments is on systems for autonomous ship management, remote monitoring, and remote- control. By analogy with other means of transport, questions do arise about the legal framework for the use of autonomous operating systems and the guarantee of safety. In this context, the joint project SAFEBin shall develop the basis for risk assessment of systems for automated ship management on inland waterway vessels with regard to their interaction with the overall system. An essential prerequisite is a detailed inventory and analysis of the current level of security being a reference framework. In addition, proven methods for risk assessment and the verification of functional safety for (partially) automated ship management for inland waterway navigation will be adapted and applied in an exemplary manner. The main focus is on systems of automation levels 3 and 4, in which human ship control plays an important role, at least temporarily, and as a fallback level. Subsequently, the basis for a forward-looking, automated assessment of situational risk is created. This work builds the basis for the final development of standards and proposals for the adaption and further development of rules and regulations for automated inland waterway navigation.
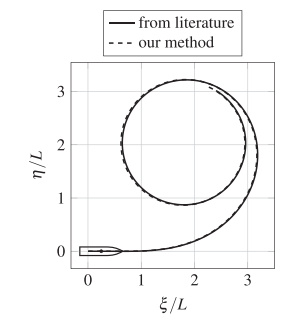
Development of a multi-level mathematical model for calculating ship motions in six degrees-of-freedom
Data
Involved Researcher:
Jakob Rzezsutko
Supervisor:
Prof. Dr.-Ing. Bettar el Moctar
Dr.-Ing. Lahbib Zentari (BAW)
Dr.-Ing. Michael Schröder (BAW)
Funding:
Project Partner:

Project information
The main objective of this project is the development of a mathematical model for ship motions based on direct system identification. The effects of sloshing in partially filled tanks, shallow water, currents, and engine dynamics are taken into account. The mathematical model is to be validated against model test and full-scale measurements.
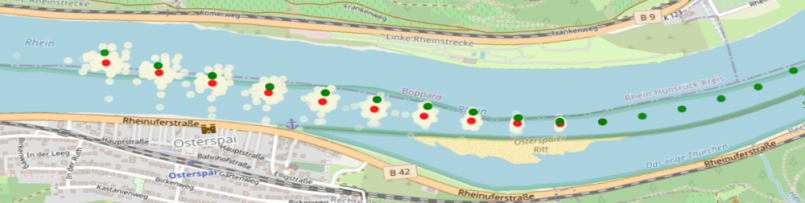
Analysis of the driving behavior of inland vessels by using machine learning
Data
Involved Researcher:
Kathrin Donandt
Supervisors:
Prof. Dr.-Ing. Dirk Söffker
Dr.-Ing. Jens Neugebauer
Dr.-Ing., Michael Schröder (BAW)
Prof. Dr.-Ing. Bettar el Moctar
Funding:
Project Partner:
Project Information
Predicting the driving behavior of vessels accurately is crucial to avoid collisions and find an efficient route when navigating in confined spaces. Automatic prediction can support navigators whereas autonomous vessels are completely dependent on it to determine the path to follow. In this project, the motion and space requirements prediction of ships involved in a given traffic situation should be conducted iteratively in two steps: At first, artificial intelligence, trained with AIS data, is used to determine the trajectories of the ships. In a second step, using a maneuvering model, sections of the respective lane widths of the river are then determined. Therefore, the significant objective of the project is to determine collision-free ship trajectories, taking into account the predicted behavior of the waterway users involved, using artificial intelligence trained with AIS data.